Although servo systems can very precisely control motor speed, position, and torque, in some applications, the motor may not be able to reach the commanded velocity due to limits in the available bus (supply) voltage from the drive. But advanced servo drives offer a technique referred to as field weakening, which alters the motor’s torque-speed curve — specifically, to allow the motor to operate at higher than rated speed with rated bus voltage.
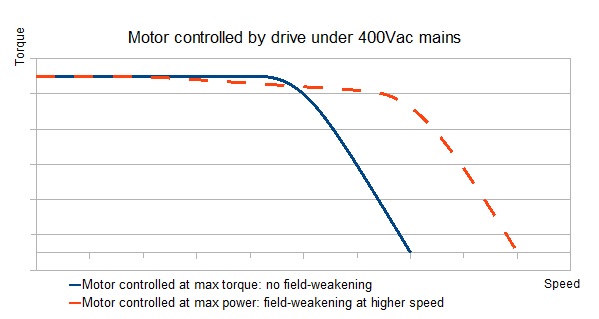
Image credit: Alxion
Field weakening enables higher motor speeds by reducing the back EMF generated by the motor. Recall that back EMF (electromotive force) is voltage created when a coil turns inside a magnetic field, and it opposes the supply (driving) voltage. In order to “weaken” the field that creates back EMF, field weakening relies on a control method known as field oriented control (FOC).
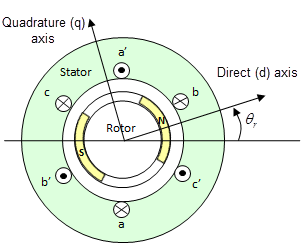
Image credit: MathWorks
Field oriented control (also referred to as vector control) is often used for AC induction motors that require dynamic torque and speed response and improved efficiency. With FOC, the quadrature (torque-producing, “q”) and direct (flux-producing, “d”) components of current are controlled independently, imitating the control scheme for a DC motor.
In normal operation, the goal of field oriented control is to maintain the d-axis current (the non-torque producing component) at zero and to control the q-axis current so that the commanded torque is generated.
Here’s how field weakening is achieved: The d-axis of the stator current is referenced to, or in-line with, the axis of the rotor’s magnetic flux. So adjusting the d-axis current (sometimes referred to as phase shifting) directly influences the rotor’s flux. In other words, positive d-axis current strengthens the rotor flux, whereas negative d-axis current weakens the rotor’s flux. More specifically, negative d-axis current weakens the field of the magnets — hence, the term field weakening.
Recall that in an AC motor, speed is determined by the frequency of the supply voltage. Because back EMF opposes (takes away from) the supply voltage, it is an important limiting factor in an AC motor’s achievable speed.
But back EMF is created by rotor flux. So adding negative d-axis current reduces the rotor flux, which means that back EMF is also reduced. The result is that more of the drive’s bus voltage is used to create (increase) motor speed, rather than being used to overcome back EMF.
Leave a Reply
You must be logged in to post a comment.